PhotonVision
The Future is in Sight
PhotonVision is a powerful, open-source vision system for FRC. It's designed to be fast and easy to use, regardless of your team's financial or technical resources.
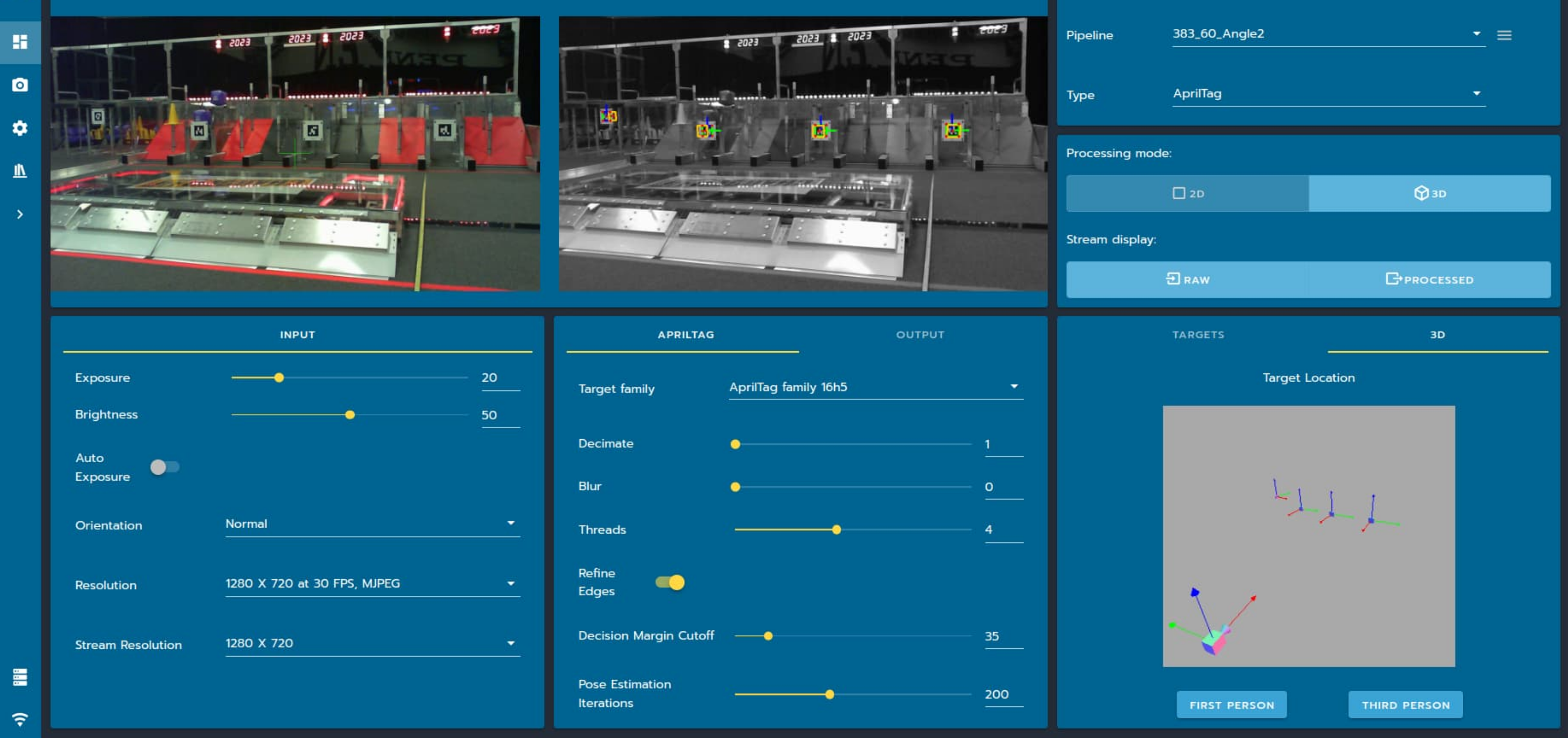
First-Class AprilTag Support
FRC Target tracking, out of the box.
Built-In Camera Calibration
Per-camera intrinsics calibration maximizes accuracy of homography
Machine Learning
Hardware-accelerated inferencing for gamepiece detection
Driver Mode Integration
You can use the same camera for driving and robot vision
Simultaneous Multi-Camera Operation
PhotonVision can run as many cameras as your hardware can handle
Multi-Tag Pose Estimation
Fuse all your available data for peak robot performance
Champs 2024 Talk
FOSS
PhotonVision is an open-source, community based vision system designed for use within the FIRST® Robotics Competition that aims to provide easy and inexpensive vision tracking to teams.
Open Source
PhotonVision is the largest FOSS FRC Vision project to date, constantly being updated with new features and bug fixes.
GNU GPL v3
The GNU GPL v3 license allows you to download, modify and share source code.
We're on GitHub
We do all of our development openly on GitHub. Transparency is key for every contributor of PhotonVision.